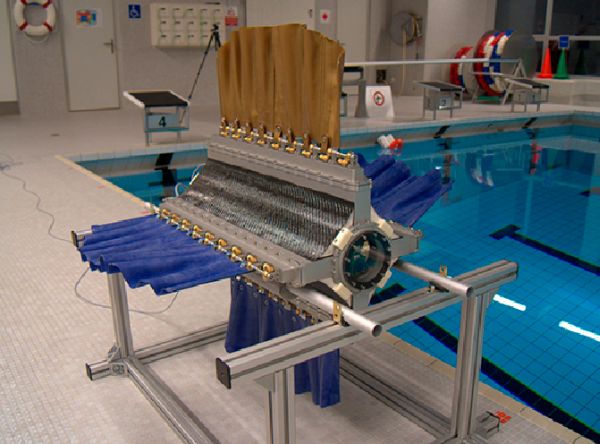
The Swiss Federal Institute of Technology (ETH) in Zürich has come up with a robot, movement of which is inspired from cuttlefish. One of its own kind, Sepios is a bot with four orthogonal fins. Peep on the link below and see the undulating fin propulsion from the ETH’s nautical robot:
Researchers have always looked upon nature for inspiration and biomimicry is the result of such perseverance efforts. Consequent upon which, they are able to develop technology that is slight above than just mere mimicking of nature.
Sepios specs
Sepios is 70 cm in length, while the wingspan is 95 cm and it weighs around 22.7 kg. It can dive at a maximum depth of 10 m with a speed of 1.8 km/h. The machine is powered by 20’000 mAh battery, and it passes 2 to 40 A of current and it can be powered up to 300W.
Although the robot is almost in its operation stage, however, implementation of software with major features remains to be done. Pressure and a humidity sensor have to be juxtaposed for proper coordination between the two. One camera and laser will be fitted for detecting collision and an Inertial Measurement Unit (IMU) for gauging speed and angular velocities.

A 3D Connexion space mouse will be used for generating external input. Omnidirectionality in the bot would be achieved by merging obstacle course and a mathematical proof.
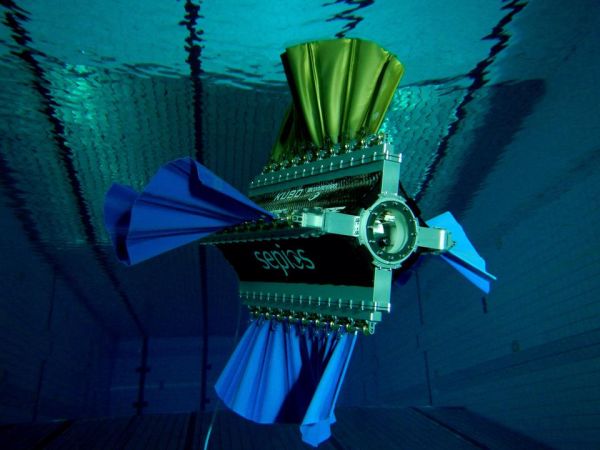
Sepios concept
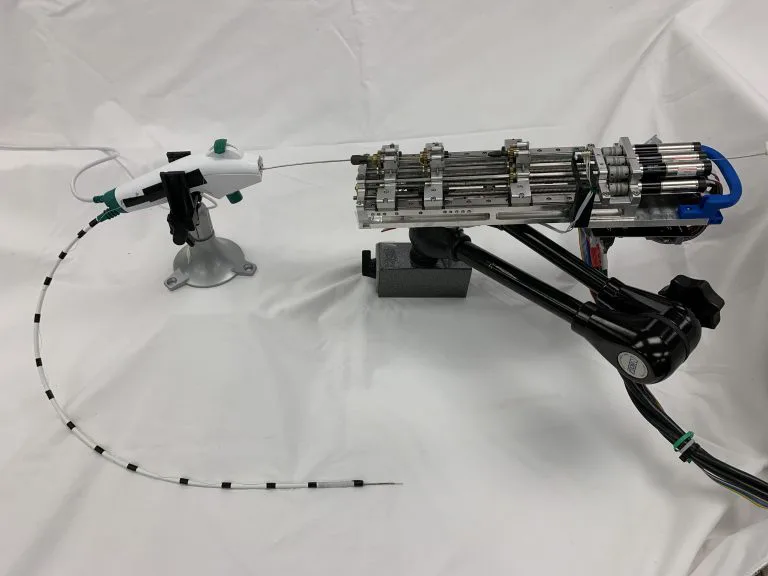
For maximizing omnidirectionality, unlike the cuttlefish, Sepios uses 4 fins. Every appendage correspond to nine rays, each operated by servo motors through bevel gears. Individual rays have a range of 270 degrees making every fin to create pressure at angular stances. This would also help in generating acrobatic motions like barrel rolls. Each fin has an individual servo controller taking control of all the servos. Entire mechanism is kept modular so that the testing can be done on fins based on different configurations.
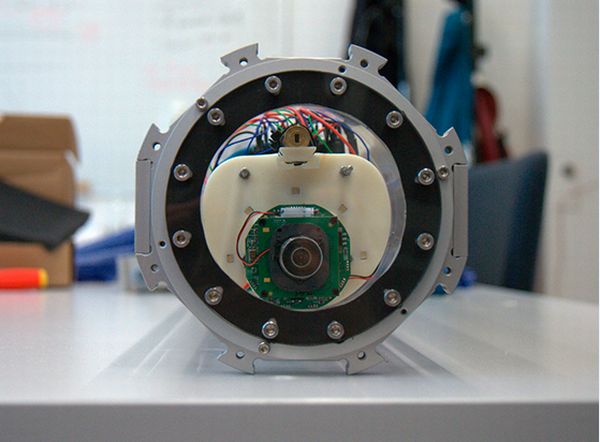
There is one central base unit where all the 4 fins are joined together. This includes one actuator, numerous sensors and one swim bladder that help the bot in remaining at a particular level depth. A National Instruments myRIO device coordinates all the input, which is also a reservoir of all the corresponding data.

Sepios project looks ambitious, it’s intriguing underwater locomotion technology would surely herald a new beginning of high tech water robots.
Source: Sepios