Whenever we talk about speed and agility, first thing that comes to our mind is Boston Dynamics Cheetah, which runs at a speed to about 45.5 km/h. Until now, none of the bots have been able to give tough fight to the big cat, however, it seems, researchers at KAIST are preparing to stand tall with their new sprinter, Raptor. It has shown an impressive speed of 46 km/h, which happens to be slightly more than the big cat. Wow!
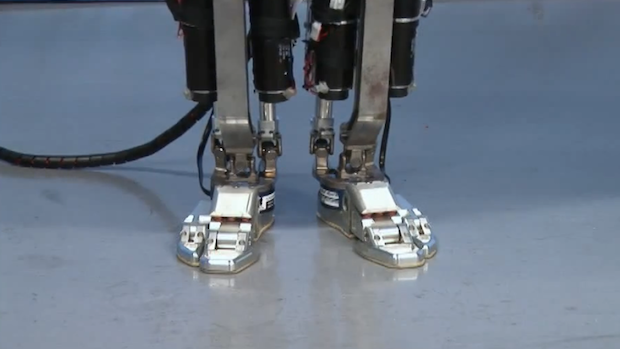
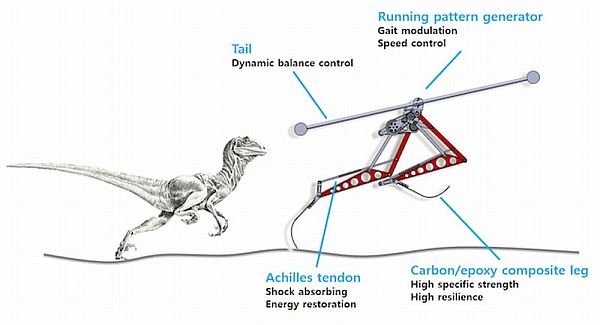
Experts at the Korea Advanced Institute of Science and Technology’s (KAIST) MSC Lab have designed a sprinting machine that is based on Velociraptor. Unlike the Cheetah, which is a huge quadruped and is powered by hydraulic actuators, Raptor is lightweight with a pair of flexible carbon-fibre prosthetic blades than solid feet.
Elastic Springs act as Tendons
Similar to Festo’s robotic kangaroo, KAIST bot is embedded with elastic springs, to reclaim energy by moderately charging the legs while jumping.
Tail and Prosthetic Blades assisted Pitch Control
Tail is added to provide balance, although it doesn’t resemble that of Velociraptor’s but works in the similar fashion, that is counter-balancing to keep away from falling to either directions. The video below shows how deftly, Raptor is able to cross over the obstacles with the help of its tail that provides the required equilibrium.
Raptor is not pioneering the usage of appendages like ‘tail’ or ‘prosthetic blades’. Researchers at the UC Berkeley have established the fact how tail helps lizards and likewise robots gain thrust and control over pitch during ascending and descending flights.
The MSU TailBot not only jumps across the obstacles but can also control its mid-air orientation during flight mechanism.
During the fall of 2010, Ryuma Niiyama, a Japanese researcher fabricated Athlete Robot that had prosthetic blades for running. It had the same carbon-fiber composition.
Impressive Velocity with an Uncomplicated Design

Considering the previous legged robots’ design, Raptor stands tall with its simple and uncomplicated design. The bot’s gait and speed is controlled by running pattern generator, which also happens to be a simple computer program.
With an aim of further optimizing Raptor, KAIST folks are working towards enhancing the speed functionality along with its control and stability.
Raptor looks truly promising, a remarkable example of biomimicry, looking forward to see it walking on the natural terrain without the training wheels of course maybe running alongside with Cheetah someday. Good luck to the Korean researchers on this.