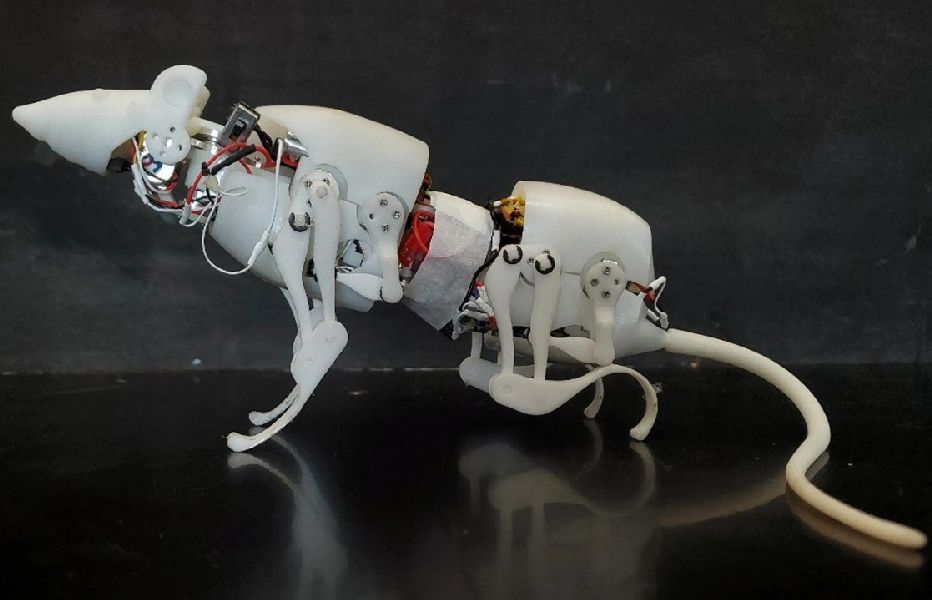
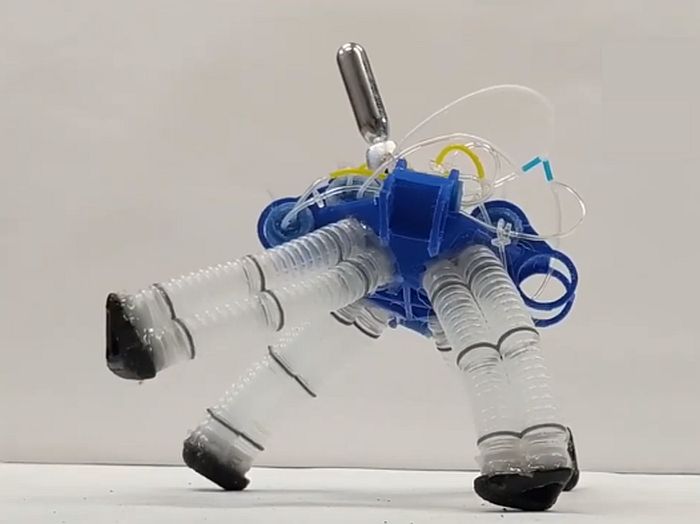
Nature has always inspired robotics engineers to design bots with the same agility and efficiency. And this is also one of the reasons why researchers look up to biomimicry to solve human design challenges. When it comes to navigate tight and congested arenas wouldn’t rodents be the best options to design a device? Researchers at Beijing Institute of Technology (BIT) thought the same. According to Qing Shi, a Professor at BIT, legged robots have limitations when operating in narrow spaces. Micro quadruped robots too can face performance issues due to…
Read MoreSQuRO, Quadruped Robotic Rat: Biomimicry