
Festo, a Germany based industrial control and automation company has been into research and development of bionics since more than two decades. It collaborated with renowned universities, institutes, development companies and private inventors across the globe and launched the Bionic Learning Network during 2006. And since then it has been delving into the subject and bringing about the best of biomimicry.
Every time their new project gets into air, they prove how they are able to merge industrial automation, and combining electronics with pneumatics in new and efficient ways. Here are some the best examples of biomimicry from Festo’s vault:
Airacuda inspired from Fish
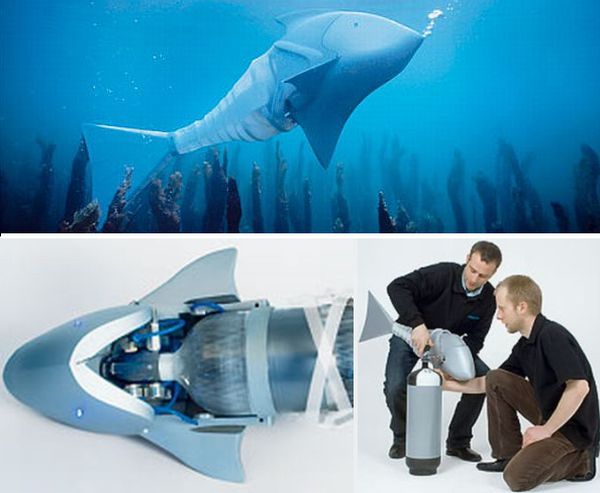
Glides smoothly in water since design shape and kinetics are inspired from fish itself. Its waterproof head controls the electronics, pneumatics and the locomotion ability. The S-shaped movement of the tail fin is guided by the Fin Ray Effect, which means, the fin consists of frames. And when pressure is exerted on either of the edge, the structure passes on the thrust forming a directional curve against the exerting force.
AquaJelly inspired from Jellyfish
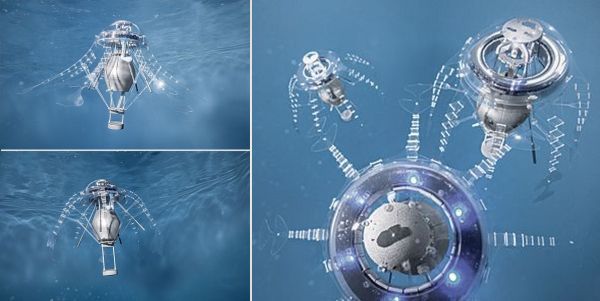
The carrier for water technology sector has demonstrated real-time monitoring on a smartphone along with collective behavior in a restricted space. As is its biological model, it has eight tentacles for propulsion along with a translucent hemisphere body. It is also the storehouse for the complex electric motor with 2 lithium-ion polymer batteries.
AquaPenguins inspired from Penguins

This technology makes use of hydrodynamics that are employed by the Penguins. Its head and tail sections have 360 degrees freedom, which means, they can maneuver in all directions. Its wing propulsion mechanism helps in moving forward as well as backwards in water.
SmartBird inspired from Herring Gull

Its excellent aerodynamic qualities and extreme agility makes it unique of its own kind. Not only it can flap its wings either sides but it can rotate them to specific angles as well. Its torsional unit is the main driving force, where the most complex control system of the machine resides and it helps in achieving the high level of efficiency during flight operation.
Exohand inspired from Human Fingers
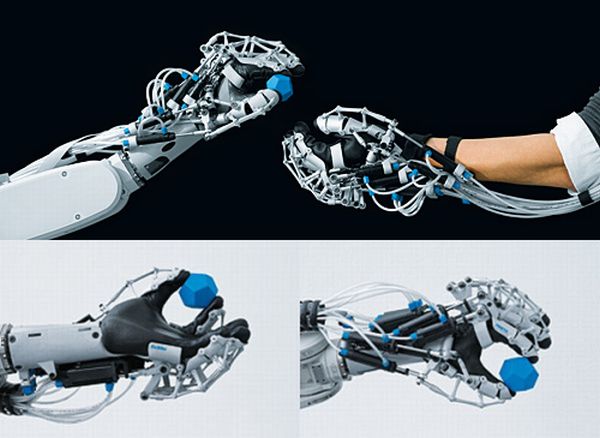
The technology is more like a human glove. It is worn on hands to give strong hand with sensitive fingers. With its modular geometry of joints, it offers physiological degrees of freedom. Its aim is to provide correct alignment and support to stroke patients. Along with it, the technology could be used in hazardous environments where human operator may take a feel of thing that is in grasp of the bot. thus manipulating objects in the real time but without actually touching them.
LearningGripper works on the principle of Human Hand

Twelve pneumatic bellows actuators with low-level pressurization bring about the workings of self-learning gripper system. It is primarily aimed for gripping and positioning round objects.
BionicOpter inspired by Dragonfly

With thirteen degrees of freedom, the ultra flight object can propel in all directions and glide without beating its wings. It has already exhibited real time communication over wireless connection. Inspite of having different and complex components and functions, it has achieved success with its minimal weight and ultra light construction.
WaveHandling works on the mechanism of Wave Motion
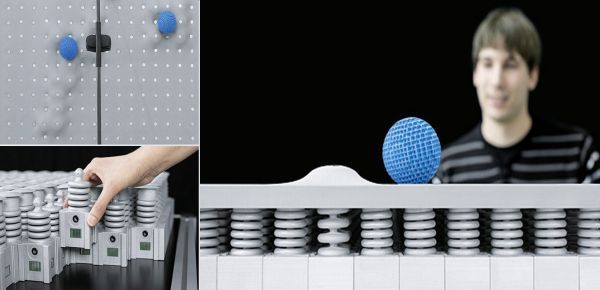
It involves carrying objects and sorting them at the same time via pneumatic conveying systems and this case, the system is derived from wave motion. Multiple bellows modules below the surface bring about the required motion.
DualWingGenerator based on the wing-beating principle

Unlike the conventional wind power stations, this system employs a pair of opposing wings to produce power. The generator simulates the natural beating of wings but in a reverse order. Birds flap their wings and move forward however, this technology doesn’t allow it move frontward but it takes the kinetic energy from the surrounding air which is then converted into rotary movement. An inbuilt electric motor morphs the energy into electricity.
BionicKangaroo, energy-efficient jump kinematics based from Kangaroo
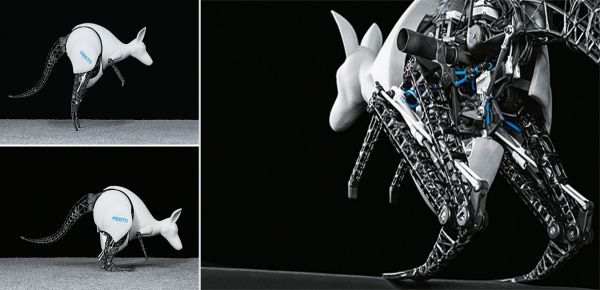
It’s been quite an ambitious project and Festo has been dedicatedly working on this since past couple of years.
BionicKangaroo’s jumping mechanism is near to precision with respect to the real ones. Its ability to recover energy from one jump to another ably is well performed by embedded elastic springs, which takes the role of tendons within the real kangaroos.
This is because upon landing these elastic springs moderately charges the legs. Like the previous bots, this machine weighs around 7kgs and is just a meter high. Its hopping stats include 0.4 m high and 0.8 meter wide, this of course is very impressive.
Festo’s holistic approach towards energy efficiency by focusing on machines and imitation of nature have taken biomimicry to the next level by providing better insights to humans with respect to nature’s workings.
Source: Festo

[…] by lispm [link] […]