
Researchers have long envisioned designing tiny intelligent autonomous machines that are capable of exploring dangerous environments or the areas where tiny bots can work with full efficiency.
They did experience success in fabricating such tiny bots, like:
- RoboBee, autonomous flying microrobot inspired by bees. The tiny bot is powered by soft artificial muscles.
- HAMR, versatile crawling microrobot mimicking cockroach. Locomotion is achieved by electro-adhesive foot pads and origami-based ankle joints.
- Bug Bots, inspired by the water-hopping creatures
However, in both the cases, the tiny bots were powered either by battery or they are embedded with electrically-driven soft actuators. Finding ways to keep these bots charged consistently has been an impossible task to achieve, at least till now.
RoBeetle: The lightest and smallest autonomous bot
Scientists at University of Southern California has made a breakthrough. They have fabricated a tiny bot that runs on methanol and makes use of artificial muscle system for locomotion. They have named it as, RoBeetle.
As the name suggests, the bot is inspired from beetle, the 50mg and 10.5mm insect. When it comes to weight and size, RoBeetle is around 88mg and 15mm. Just almost the size of its living counterpart. This also makes it the lightest and smallest autonomous bot built so far.
Powered by methanol
RoBeetle is powered by catalytic combustion of methanol.
Electric power robots generally depend on external sources for continuous operation and locomotion. But the technology behind RoBeetle’s micro actuation is based on the use of controlled chemically powered artificial muscles.

The two 2 tech concepts behind RoBeetle are as follows:
Catalytic micro-muscle
A catalytic micro-muscle it is obtained by coating nitinol wire with a layer of platinum powder. Nitinol is a metal alloy of nickel and titanium.
Platinum enables the catalytic combustion of methanol. Therefore, the (nitinol) wire is glazed thickly with platinum powder particles to make a highly active surface for catalytic combustion.
The released thermal energy is directly used to heat up the wire.
Due to this heat energy, the wire contracts, due to the shape memory effect associated with the nitinol material.
Shape memory effect (SME) is a phenomenon, in which a material acquires a deformed shape, in this case, contracts on heating or temperature variation.
When the flow of thermal energy is stopped, the wire cools down and comes back to its original length.
Controllable micro-robotic actuation is generated by repeating this process.
An integrated micro-scale mechanical control mechanism
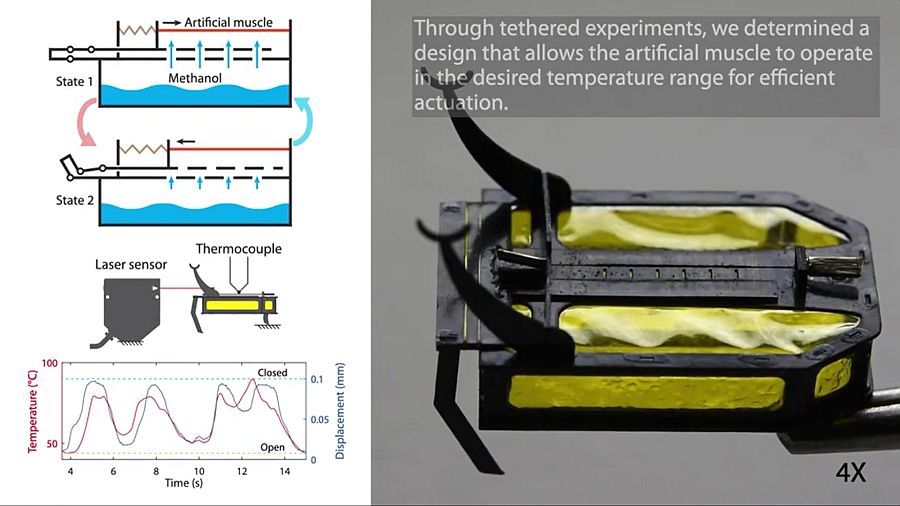
When periodically excited with methanol vapor, the mechanism oscillates autonomously between two states.
For efficient actuation, artificial muscle was made to operate in different temperature range through iteration in different experiments.
The team claimed to access locomotion performance, the tiny bot was made to crawl under different atmospheric conditions like climbing ramps with various degrees. And on surface with different levels of roughness.

Payload
RoBeetle is able to carry 2.6 times of its own body weight for 2 hours consistently with different atmospheric conditions. For instance, it can target different tasks by carrying various on-board electronics, for instance, entering an electric gate by carrying a wireless RFID sensor.
Relatively, the smallest battery-powered crawling robot – that weighs around one gram – can function for 12 minutes, said Xiufeng Yang, RoBeetle’s inventor.
In an outdoor locomotion experiment, the researchers demonstrated that power and control autonomy of RoBeetle enabled it to operate in non-lab environment. This proves the bot’s efficacy in potential functionality in multiple scenarios, especially in places that are inaccessible to humans.
The takeaway
The problem with most of the autonomous machines is locomotion. And when it comes to tiny bots, the actuation issue becomes l’il tricky because motors are themselves bulky and require electricity, consequently, batteries become necessary.
Therefore, an artificial muscle system based on liquid fuel – methanol – developed by researchers at University of Southern California looks promising.
Researchers envision to use these tiny bots in applications like infrastructure inspection, search-and-rescue missions after natural calamities, tracking things under huge debris. Artificial pollination and environmental monitoring are some other areas where these bots can assist.
Via: Science Robotics


