Starting in the early 1900s, one of the problems that baffled neuroscientists worldwide was the role of central and peripheral nervous systems in swimming locomotion. In other words, how swimming locomotion is generated and how vertebrates synchronize the rhythm that is required for the locomotion.
The nervous system is a complex mesh of neurons that is responsible for sending, receiving and interpreting information from all parts of the body. It responds to external stimuli and also monitors & co-ordinates the functions of internal organs. In vertebrates it consists of two main parts:
- central nervous system (CNS), that corresponds to the brain and spinal cord and
- the peripheral system which includes the nerves that connect to muscles and the sensory neurons.
According to Sir Charles Scott Sherrington (1857 – 1952) peripheral system is responsible for rhythmic pattern in swimming locomotion. As per his proposal, a limb or a fin, in case of fish, continuous to move in one direction until it triggers a sensory signal to move in the opposite direction. Quite contrary to this, Thomas Graham Brown (1882 – 1965) suggested that particular oscillatory circuits in CNS is responsible for the rhythms. Since then, it’s an ongoing debate in neuroscience community.
To break the ice, EPFL scientists have developed lamprey inspired swimming robot to understand how the two nervous system interact to generate swimming.

AgnathaX
AgnathaX, the swimming robot, is used by an international team of researchers from EPFL, Japan, France and Canada to understand the neuroscience that is backing-up the swimming locomotion in vertebrates.
It is difficult to understand the swimming mechanism in living organisms since the process is so intricate that it involves almost all the components of the central as well as peripheral nervous systems. It is not easy to track down the dynamics and the mutual influence of the entire nervous system.
The swimming robot
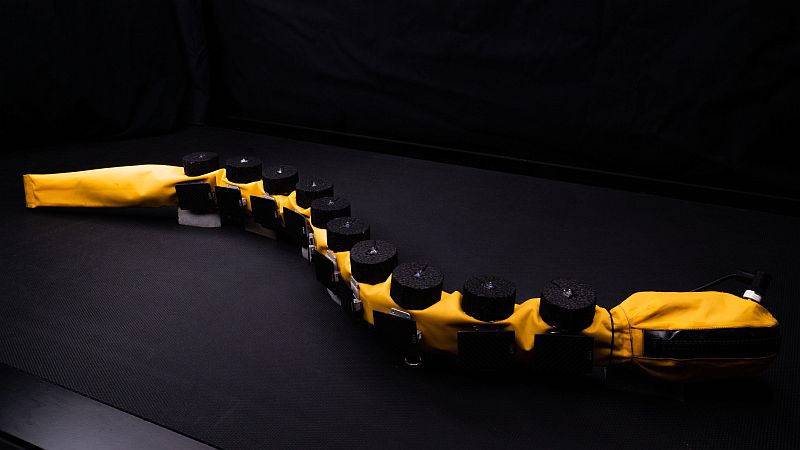
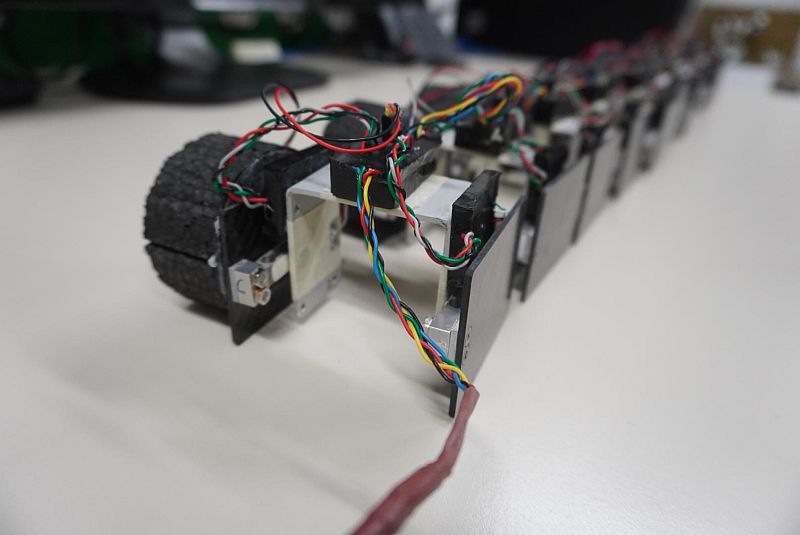
An example of biomimicry, AgnathaX is inspired from lamprey, an eel-like aquatic jawless vertebrate. The bot is composed of 10 segments that replicate the muscles along the body.
Each segment has a motor that allow side to side movement. Also, it has a sensor unit on each of its side, to measure the force between the water and the robot.
Team then introduced AgnathaX into a pool of water that is loaded with motion tracking system. In this way, the researchers quantified each and every movement and compared with the expected measurements.
To understand the complex dynamics of nervous system, researchers simulated various components of the robot and projected mathematical models.
Segmentally, they activated and deactivated the central and peripheral inputs and outputs to test hypotheses from the point of view of neuroscience.
Result
The study was able to solve the old debate of neuroscience. Both the roles of central and peripheral nervous systems are important in swimming. The two systems are required to control and sustain each and every movement. Results proved:
- Both the two nervous system – CNS and peripheral – are responsible for producing robust locomotion.
- Robust against neural disruption, for instance, communication failure between segments and sensors.
- Also, working in tandem helps in swimming at high speeds.
- Peripheral nervous systems in animals – as depicted by AgnathaX – senses the amount of water that is pushing the body. This is a useful signal to generate locomotion patterns. An important function of peripheral nervous systems that is hidden from the central nervous system.
In order to go into more depth, the researchers introduced a spinal cord lesion by disengaging communication between the different segments of the robot. They observed that even when the communication is cut, the pressure sensors on each side of the segment were enough to maintain the undulating motion.

Takeaway
These findings not only provide an insight into the field of neuroscience but it also helps in robotics towards developing effective swimming machines.
In neuroscience it will assist in understanding how do we generate swimming locomotion and how we synchronize the rhythm that is required for the locomotion.
While in robotics, the study will help swimming robots to resist big perturbations. Researchers envision that the finding will enhance swimming robots that are employed for search & rescue missions along with environmental monitoring. After all, robotics engineers have always taken inspiration from animals and brought that robustness to robotics.